











-First of all, when you are building this kit, you MUST calibrate the servos before you screw them in, because if you don't, the legs will end up in all weird directions when you finish. If you skipped this step, just unscrew the black thing and pop the servo out, move it to the proper direction, and rescrew. If the servo doesn't pop out, loosen the top bolt enough so you can. Don't completely unscrew the bolt because you will have to reattach the whole leg.
-If you are stuck on trying to program the robot, or getting to that step, download the newest version of the Servo32 Firmware, which should be v2.0. When the directions say "Install Python", and then "Mac Instructions", enter the command line into Terminal, which is located in the Applications folder (If you cannot find it in the Apps folder, try and find in Searchlight. The icon is of a black computer screen with digits on it.) When entering the command line, DO NOT COPY THE $ SIGN! It simply doesn't work. I sat frustrated at my desk for many minutes, frustrated, before I discovered that it isn't needed.
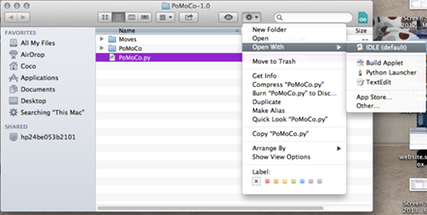
-Set the set the PoMoCo file up to open with Idle. Like so (Right Click). I've found this to be useful.
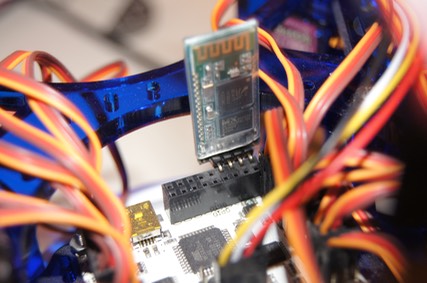
- (Shown Below)To connect Hexy to Bluetooth, put the bluetooth module with the 4 little pegs coming out in the bottom right corner. (The charger plugs are facing towards you.) On the bluetooth module, there is a red LED that flashes when attempting to connect to your computer and it is solid when it has made a connection.
- If your Hexy isn't responding to commands and is just sinking to the surface it's on, don't fret, because it is probably just your batteries. If you are using non-rechargeable batteries, such as Duracell, this might happen. This is because the current isn't enough and Hexys suck power. My advice would be to buy NiHm batteries, or the rechargeable type. There is a recommendation of the type on the Hexy site already.
-Make sure that your "zero" is set as the leg straight out, and not in a crawl position.
-If not all of the legs are working, test them all individually in the PoMoCo file. If one doesn't move, twitches, or only responds sometimes, it's gears might be stripped, rendering the motor useless. To buy an extra of these motors to replace a broken one, visit Adafruit.
